|
Goal of the project
The Line of Sight (LoS) of a satellite could be disrupted by obstacles, reducing the accuracy of the information provided to a Global Navigation Satellite System (GNSS)
receiver. The first objective of the project is to eliminate or weight the signals coming from these satellites. To simplify the identification of satellites having a direct
LoS with the GNSS receiver, this project proposes, as a supplementary sensor, to use a fish eye camera.
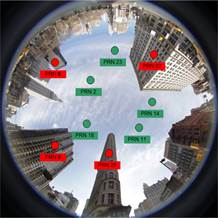 
left: Original image. The satellites were marked at Thales-Alenia;
right Segmentation result (the non sky region is colored in black) obtained applying an original segmentation method developed in our research team.
The segmentation of the image provided by the fish eye camera permits to identify the satellites that are not on the LoS of the GNSS receiver.
Short description of the project

IMFUSING algorithm architecture final solution
To provide sufficient information to the GNSS receiver, at the image processing level, the algorithms conceived will include the calibration of the camera sensor, image segmentation techniques, and distance and angle measurements deduced from calibrated image analysis. The algorithms at user sensor level will use camera information to discard measurements, will estimate boundaries of accuracy, will build a Quality of Service (QoS) indicator on the computed position and will authenticate the position. The algorithms at tracking loop level will use camera information to adjust the GNSS receiver correlator.
Project implemented by:
UPT as contractor and Thales-Alenia Toulouse France as subcontractor
Implementation period:
October 1 2014 – March 30 2017
Main activities
Phase I 01/10/2014–31/08/2015: State of the art analysis (already validated),
Phase II September 1 2015 – November 15 2017
01/09/2015–30/06/2016: Core technical development (already validated)
01/12/2015-15/03/2017: Test campaign (validated)
15/12/2016-31/07/2017: Performance analysis (validated)
01/06/2017-15/01/2018: Dissemination and exploitation (validated)
01/02/2018-31/07/2018: 6 month support period.
Results
Satellite localization often suffers in terms of accuracy due to various reasons. One possible source of errors is represented by the lack of means to eliminate NLoS satellite related data.
IMFUSING proposes a method for fusing existing GNSS data with new information, extracted by using roof mounted cameras and adequate image processing algorithms.
The roof mounted camera is used to robustly segment the sky regions. The localization approach can benefit from this new information as it offers a way of excluding the NLoS satellites. The output of the camera module is a probability map. One can easily decide which satellites should not be used for localization, by manipulating this probability map. Our approach is validated by extensive tests, which demonstrate the improvement of the localization itself (HPE) and a moderate degradation of protection levels involved in the localization (HPL).
Deliverables: Report on the State of the art in Image-GNSS fusion, Preliminary Design Review Report, Critical Design Review Report, Test Review Board Report, Executive Summary Report, MATLAB codes for developed algorithms.
Dissemination: Scientific paper in a scientific journal, Technical Note on synthesis of the study.
A first dissemination result:
- Nafornita C., David C., Isar A., Preliminary results on sky segmentation,
Proceedings of 2015 International Symposium Signals Circuits and Systems, 9-10 July 2015, Iasi, Romania, pp. 1-4, 10.1109/ISSCS.2015.7203933, Print ISBN: 978-1-4673-7487-3
Scientific paper at an international conference:
- David, V. Gui, G. Carrié and others, “IMFUSING – GNSS Localization in Constraint Environment by Image Fusing Techniques”. Proc. 6th CEAS Conference, October 2017, Bucharest, Romania
Applicability of the results
The subject was evaluated at the start at technology maturity level 1 (Scientific Research), and it is aimed to conclude the project at technology readiness level (TRL) 3 (Laboratory Experiments).
Financed through/by
European Space Agency (ESA), contract number 10031/02.08.2014 – UPT: 128.234 EURO, Thales Alenia: 70.000 EURO.
Research Centre
Intelligent Signal Processing Research Centre
Research Team
Prof. Miranda NAFORNITA PhD, Prof. Corina NAFORNITA PhD, Prof. Andrei CAMPEANU PhD, Prof. Ioan NAFORNITA PhD, Prof. Marius OTESTEANU PhD, Prof. Vasile GUI PhD, Prof. Alexandru ISAR PhD, Assist. Prof Ciprian DAVID PhD
Contact information:
Prof. Alexandru ISAR, PhD
Electronics and Telecommunications Faculty/Communications Department/ 2 Bd. V. Parvan, 300223, Timisoara
Phone: (+40) 256 403307
E-mail: alexandru.isar at upt.ro
Web: http://www.tc.etc.upt.ro/isprc/
|